รายละเอียดเพิ่มเติม
TURTLEBOT3 Burger คือหุ่นยนต์ขนาดเล็กเพื่อการศึกษาและงานวิจัยอเนกประสงค์ มีรูปทรงเป็นชั้นคล้ายกับเบอร์เกอร์ ทำงานบนระบบปฏิบัติการในโครงการ ROS (Robot Operating System) ทำให้มีความยืดหยุ่นในการพัฒนาโปรแกรม เนื่องจาก ROS มีเครือข่ายผู้ร่วมพัฒนาอยู่ทั่วโลก โดยปัจจุบัน ROS ได้กลายเป็นแพลตฟอร์มสำหรับงานวิจัยหุ่นยนต์ทั่วโลก
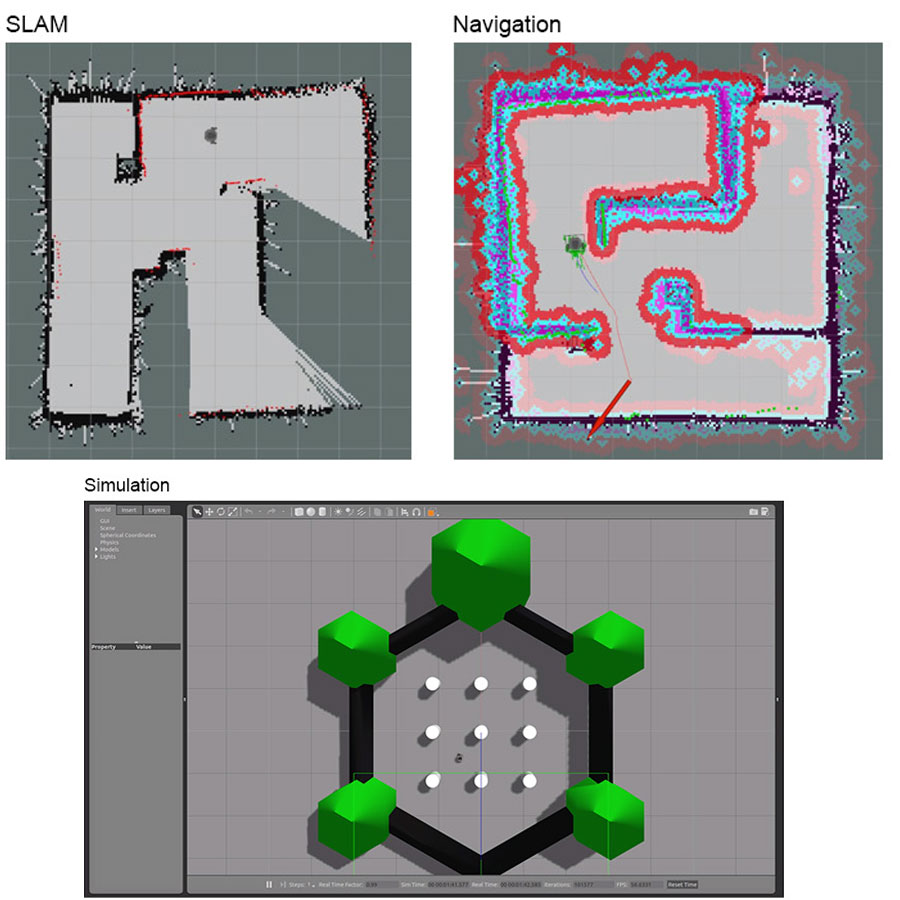
TURTLEBOT3 Burger มีจุดเด่นในการพัฒนาเป็นหุ่นยนต์นักสำรวจด้วยเทคโนโลยี LiDAR คือเทคโนโลยีการสำรวจภูมิประเทศ ซึ่งมีเทคโนโลยีที่เหมือนกับการทำงานของ Radar คือเป็นการวัดระยะจากระยะเวลาในการเดินทางของลำแสงเลเซอร์ ที่เดินทางจากเซนเซอร์ไปยังวัตถุเป้าหมาย และเดินทางกลับมายังตัวเซนเซอร์ ทำการประมวลผลและสร้างแผนที่ด้วยบอร์ด RaspberryPi 4 – 4GB RAM
TURTLEBOT3 Burger ใช้บอร์ด OpenCR ในการควบคุมการเคลื่อนที่และพัฒนาโปรแกรมด้วยซอฟต์แวร์ Arduino บนบอร์ดยังมาพร้อมกับตัวตรวจจับพิเศษได้แก่ Gyroscope, Accelerometer และ Magnetometer
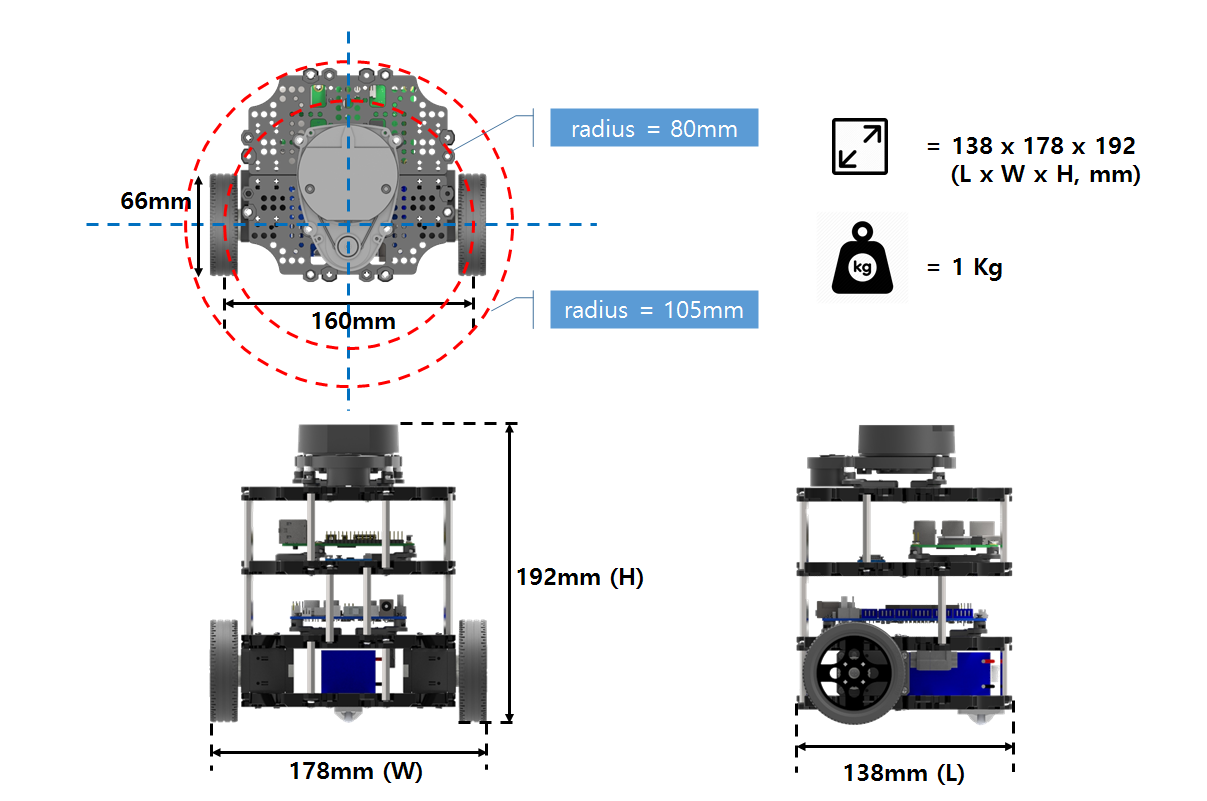
ตัวหุ่นยนต์มีขนาดเพียง 138mm x 178mm x 192mm (กว้าง*ยาว*สูง) โครงสร้างทำจากพลาสติกคุณภาพสูงทนแรงกระแทกได้ดี ขับเคลื่อน 2 ล้อ ด้วยชุดเฟืองขับมอเตอร์ DYNAMIXELs
อุปกรณ์ในชุด