รายละเอียดเพิ่มเติม
ชุดเรียนรู้นี้เกิดขึ้นจากความร่วมมือของบริษัท อินโนเวตีฟ เอ็กเพอริเมนต์ จำกัดหรือ INEX กับ Artronshop ผู้พัฒนาโปรแกรม microBlock IDE โดยมีการพัฒนาบอร์ดไมโครคอนโทรลเลอร์ขนาดเล็กที่เลือกใช้ชิปไมโครคอนโทรลเลอร์ร่วมสมัย RP2040 จาก Raspberry Pi Foundation ซึ่งใช้หน่วยประมวลผล 32 บิต ARM Cortex M0 แกนสมองคู่ นำมาประกอบกับอุปกรณ์และวงจรขับมอเตอร์ ได้เป็นบอร์ดควบคุมที่ชื่อ KidMotor V4i โดยในเวอร์ชัน 4i นี้รองรับการเขียนโปรแกรมควบคุมจากคอมพิวเตอร์ แล้วอัปโหลดโค้ดมายังไมโครคอนโทรลเลอร์เพื่อกำหนดการทำงานได้โดยตรง
เครื่องมือในการพัฒนาโปรแกรมใช้ได้หลากหลายทั้งโปรแกรมภาษาไพทอนแบบย่อส่วนหรือ microPython ภาษา C/C++ และแบบบล็อก ประกอบด้วย microBlock IDE ที่พัฒนาโดย Artronshop ของคนไทย รองรับการพัฒนาโปรแกรมด้วยบล็อกสำหรับผู้เริ่มต้นและแบบ microPython นอกจากนั้นยังใช้ Thonny IDE และ Circuit Python ของ Adafruits Indudtries จากสหรัฐอเมริกาได้ด้วย ด้านการพัฒนาโปรแกรมด้วยภาษา C/C++ ทำได้ผ่าน Arduino IDE ด้วยการเพิ่มข้อมูลของฮาร์ดแวร์ผ่านเมนู Board manager ของ Arduino IDE
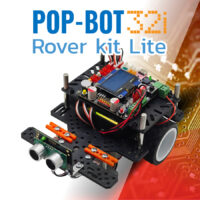
ชุดฝึกการเขียนโปรแกรมควบคุมอุปกรณ์ระบบสมองกลฝังตัวด้วยหุ่นยนต์อัตโนมัติขนาดเล็กรุ่น mikroRover นี้มีอุปกรณ์มาให้ครบ รวมถึงไขควง, สายต่อต่างๆ และแบตเตอรี่แบบประจุได้ด้วย ทำให้ผู้ใช้งานไม่ต้องจัดหาอุปกรณ์ใดๆ เพิ่มเติมอีก โดยมีการนำเสนอ 2 รุ่นคือ
mikroRover Lite Kit เป็นรุ่นเริ่มต้น มีอุปกรณ์เพียงพอสำหรับการใช้เรียนรู้ตั้งแต่การเคลื่อนที่เบื้องต้น การใช้งานตัวตรวจจับเพื่อหลบหลีกหรือเข้าหาวัตถุแบบไม่สัมผัส การตรวจจับเส้นและตรวจสอบขอบเขตพื้นที่
mikroRover Standard kit หรือรุ่นมาตรฐาน มีอุปกรณ์เพียงพอสำหรับการใช้เรียนรู้ตั้งแต่การเคลื่อนที่เบื้องต้น การใช้งานตัวตรวจจับเพื่อหลบหลีกหรือเข้าหาวัตถุแบบไม่สัมผัส การตรวจจับเส้นและตรวจสอบขอบเขตพื้นที่ และเพิ่มเติมชุดอุปกรณ์หนีบจับวัตถุ Gripper-X เพื่อช่วยให้เกิดกิจกรรมการเรียนรู้ได้เพิ่มมากขึ้น

อุปกรณ์ในชุด mikroRover Lite Kit (รุ่นเริ่มต้น) ประกอบด้วย
1. บอร์ดไมโครคอนโทรลเลอร์ที่ติดตั้งแบตเตอรี่และแผ่นรองพร้อมใช้งาน
2. สาย USB-C ยาว 1 เมตร
3. โครงหุ่นยนต์พลาสติก ABS ฉีดขึ้นรูป ไม่แตกหักง่าย
4. ชิ้นส่วนทางกล อาทิ นอต สกรู เสารอง โลหะฉาก ขิ้นต่อพลาสติก
5. ล้อ ATX และยาง
6. ล้ออิสระ
7. มินิบอร์ด ZX-03 สำหรับตรวจจับแสงสะท้อนอินฟราเรด พร้อมสายต่อ 2 ชุด
8. โมดูลวัดระยะทางด้วยคลื่นอัลตร้าโซนิกรุ่น ZX-SONAR1M พร้อมสายต่อ
9. มินิบอร์ด ZX-SPEAKER สำหรับขับเสียง
10. เอกสารการประกอบหุ่นยนต์และใช้งานเบื้องต้น
คุณสมบัติของบอร์ดควบคุม KidMotor V4i
- ใช้ไมโครคอนโทรลเลอร์ RP2040 จาก Raspberry Pi Foundation
- มีสวิตช์เปิด–ปิดสำหรับควบคุมการจ่ายพลังงานให้กับวงจร
- มี LED แสดงสถานะแบตเตอรี่
- มีจุดต่อพอร์ต USB-C สำหรับอัปโหลดโค้ดและประจุแบตเตอรี่
- มีจุดต่อบัส I2C สำหรับต่อกับอุปกรณ์ภายนอกผ่านระบบบัส I2C ใช้คอนเน็กเตอร์ที่จัดสัญญาณแบบ KB Chain (RH5) และ GROVE (PH4)
- มีวงจรขับมอเตอร์ไฟตรง 2 ช่องพร้อม LED แสดงทิศทาง ขับมอเตอร์ไฟตรง 3 ถึง 6V กระแสไฟฟ้าสูงสุด 1A
- เอาต์พุตต่อเซอร์โวมอเตอร์ 3 ช่อง จ่ายไฟเลี้ยงเซอร์โวมอเตอร์ 5V
- ติดตั้งจอแสดงผล OLED ขนาด 0.96 นิ้ว ความละเอียด 128×64 พิกเซล ติดต่อผ่านระบบบัส I2C
- ติดตั้งสวิตซ์อินพุตดิจิทัล 2 ตัว เป็นสวิตช์กดติดปล่อยดับ ทำงานด้วยลอจิก “0” ใช้ทดสอบการติดต่ออุปกรณ์อินพุตดิจิทัลและใช้เป็นสวิตช์กำหนดการทำงานแบบโปรแกรมได้
- จุดต่ออุปกรณ์อินพุตเอาต์พุตดิจิทัล 3 ช่อง ใช้คอนเน็กเตอร์แบบ JST 3 ขา 2 มม.
- จุดต่ออุปกรณ์อินพุตเอาต์พุตดิจิทัล/แอนะล็อก 2 ช่อง รองรับแรงดันไฟตรงอินพุต 0 ถึง 3.3V ใช้คอนเน็กเตอร์แบบ JST 3 ขา 2 มม.
- มีแบตเตอรี่ LiPo 3.7V 2000mAH มาพร้อม ใช้สำหรับจ่ายพลังงานให้กับบอร์ด KidMotor V4i และมอเตอร์ทั้งหมด
⊕ mikroRover Activity Guide (Arduino version) – ENGLISH
⊕ mikroRover assembly (การประกอบ -ภาษาไทย)
⊕ mikroRover assembly – ENGLISH
⊕ mikroRover book ( 5 บทแรก จากทั้งหมด 7 บท )